Redis 字典
字典结构
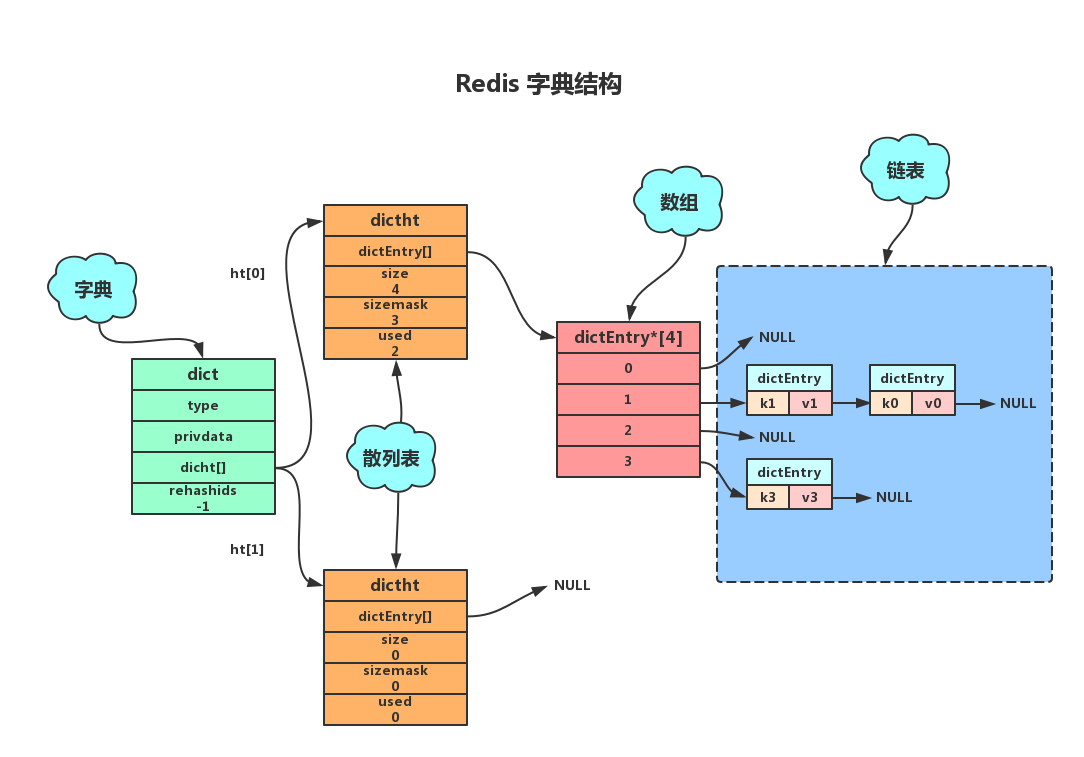
dict 描述一个字典,其中的 dictht 描述哈希表,其中的 dictEntry 描述键值对结构
字典dict数据结构
Redis中的字典是由dict.h/dict结构表示
1 | typedef struct dict{ |
ht属性是一个包含两个项的数组,数组中的每个顶都是一个dictht哈希表,一般情况下只使用ht[0]哈希表,ht[1]哈希表只会在进行rehash时使用,包括rehashidx也是在rehash时用到的。
哈希表dictht数据结构
1 | typedef struct dictht{ |
table属性是一个数组,数组中的每一个元素都是一个指向dict.h/dictEntry结构的指针,每个dictEntry结构保存着一个键值对。
sizemask属性的值总是等于size-1,这个属性和哈希值一起决定一个键应该被放在什么位置
哈希表节点dictEntry数据结构
哈希表节点使用dictEntry结构表示,每个dictEntry结构都保存着一个键值对;
1 | typedef struct dictEntry{ |
保存的值(v)可以是一个指针,或者一个uint_t整数,又或者是一个int64_t整数
hash冲突解决
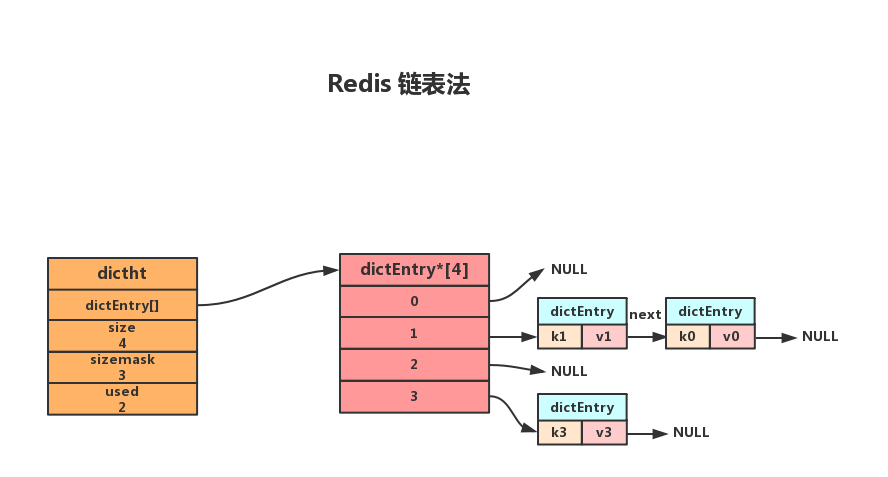
当键k0和k1的经过散列函数得到索引值都为1时,就会使用next指针将两个节点连接起来。而由于节点没有指向链尾的指针,因此新的节点总是插入到链表的头部,排在已有节点的前面。
rehash
触发条件
散列表负载因子越大,代表空闲位置越少,冲突也就越多,散列表的性能会下降。为了让哈希表的负载因子维持在一个合理的范围之内,当哈希表存储的键值对太多或者太少,程序要对哈希表的大小进行相应的扩展或者收缩。
负载因子计算方式:
负载因子=哈希表以保存的节点数量/哈希表的大小,load_factor=ht[0].used/ht[0].size
- 服务器目前没有执行的BGSAVE命令或者BGREWRITEAOF命令,并且哈希表的负载因子大于等于
1 - 服务器目前正在执行BGSAVE命令或者BGREWRITEAOF命令,并且哈希表的负载因子大于等于
5 - 当负载因子小于
0.1时,程序自动开始执行收缩操作
Redis这么做的目的是基于操作系统创建子进程后写时复制技术,避免不必要的写入操作。
原理
- 为
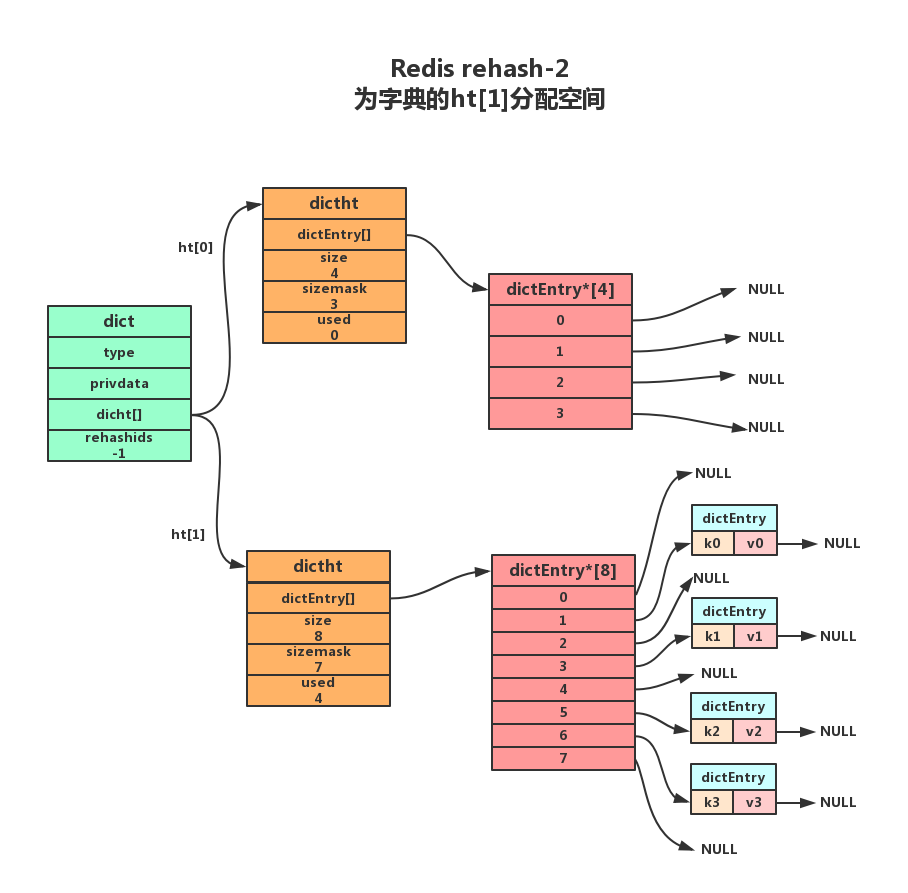
ht[1]分配空间, 让字典同时持有ht[0]和ht[1]两个哈希表。ht[1]的大小取决于要执行的操作以及ht[0]当前包含的键值对数量(即:ht[0].used的属性值)
- 扩展操作:ht[1]的大小为 第一个大于等于
ht[0].used*2的2的n次方幂。如:ht[0].used=3则ht[1]的大小为8,ht[0].used=4则ht[1]的大小为8。- 收缩操作: ht[1]的大小为 第一个大于等于
ht[0].used的2的n次方幂

将保存在ht[0]中的键值对重新计算键的散列值和索引值,然后放到ht[1]指定的位置上

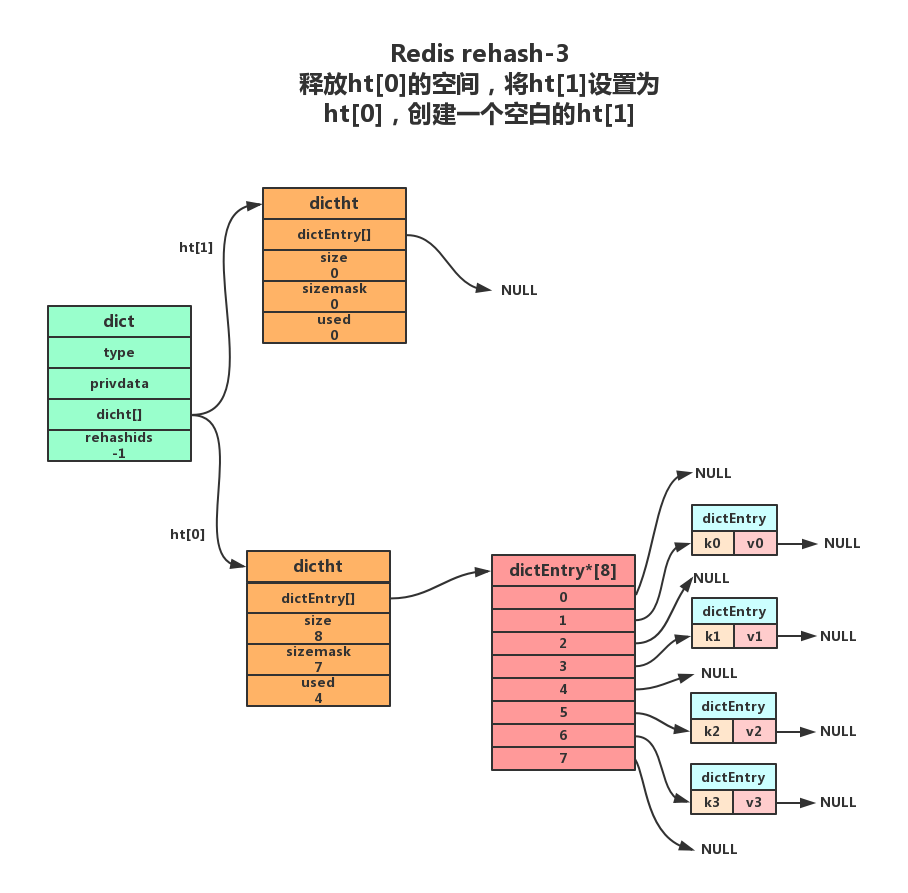
将ht[0]包含的所有键值对都迁移到了ht[1]之后,释放ht[0],将ht[1]设置为ht[0],并创建一个新的ht[1]哈希表为下一次rehash做准备
渐进式rehash
为了解决一次性扩容耗时过多的情况,可以将扩容操作穿插在插入操作的过程中,分批完成。当负载因子触达阈值之后,只申请新空间,但并不将老的数据搬移到新散列表中。当有新数据要插入时,将新数据插入新散列表中,并且从老的散列表中拿出一个数据放入到新散列表。每次插入一个数据到散列表,都重复上面的过程。经过多次插入操作之后,老的散列表中的数据就一点一点全部搬移到新散列表中了。这样没有了集中的一次一次性数据搬移,插入操作就都变得很快了。
rehash步骤
- 为
ht[1]分配空间, 让字典同时持有ht[0]和ht[1]两个哈希表。 - 在字典中维持一个索引计数器变量
rehashidx, 并将它的值设置为0,表示rehash工作正式开始 - 在rehash进行期间, 每次对字典执行添加、删除、查找或者更新操作时, 程序除了执行指定的操作以外, 还会顺带将
ht[0]哈希表在rehashidx索引上的所有键值对rehash到ht[1], 当rehash工作完成之后, 程序将rehashidx ++。 - 随着字典操作的不断执行, 最终在某个时间点上,
ht[0]的所有键值对都会被 rehash 至ht[1], 这时程序将 rehashidx 属性的值设为 -1 , 表示 rehash 操作已完成。
源码如下:
1 | // |
参数 n,这个参数用于控制单次最多转移空桶数量。
正常情况下,一次 rehash 只会转移一个桶,但如果上一次转移了索引为1的那个桶,下一次来会遍历后面一个桶,如果继续为空就继续向后遍历,直到找到一个存储了我们节点的非空桶,极端情况下,如果字典表中只有最后一个桶有节点,那么一次的 rehash 就要遍历所有的桶,时间复杂度 O(n),这会导致客户端等待过长时间,所以新版本中额外传一个参数 n 用于控制最多遍历的空桶数。
方法的尾部会进行一个校验,如果当前桶转移结束后,当前字典的 rehash 过程完全结束,那么修改 ht[0] 指针引用,让他指向新的字典表 ht[1],并设置 rehashidx 为 -1,标记整个字典 rehash 结束。
rehashidx一共有三种状态,0表示要开始进行rehash,-1表示rehash结束或目前没有进行,其它值就表示正在进行rehash。
set指令rehash过程
1 | dictEntry *dictAddRaw(dict *d, void *key, dictEntry **existing) |
当我们添加键值对的方法,函数的最开头逻辑就是调用 dictIsRehashing 方法判断当前的字典表是否处于 rehash 状态,也即判断 rehashidx 是否不等于 -1 。
默认情况下,一次 rehash 过程,redis 允许最多 10 空桶的访问就要返回,不得逗留。值得注意的是,方法的后续逻辑会判断当前字典如果正在进行 rehash,那么新的键值对将不再向 ht[0] 中添加,而直接转而添加到 ht[1] 中。
get指令rehash过程
1 | dictEntry *dictFind(dict *d, const void *key) |
可以看到,同样也是有 dictIsRehashing 方法的判断,如果字典处于 rehash 状态,即需要去完成一个桶的转移,然后才能返回。值得注意的是,方法的中间逻辑是嵌套在一个 for 循环中的,供两次循环,第一次从 ht[0] 中搜索我们给定 key 的键值对,如果没有找到,第二次循环将从 ht[1] 中搜索我们要查询的键值对。
总结
- 在渐进式 rehash 进行期间,字典的删除(delete)、查找(find)、更新(update)等操作会在两个哈希表上进行
- 如果是查找的话,就会现在ht[0]中查找,没有就去ht[1]中找,但是如果是增加的话,就会一律保存到ht[1]中,不会再像ht[0]中进行任何添加操作,保证ht[0]中的数据只减不增,直到他变成一个空表